
Spyder Hexapod
Page 1 of 1
![]()
 Spyder Hexapod
Spyder Hexapod
![]() by pyroelectro Wed Jun 15, 2011 8:17 pm
by pyroelectro Wed Jun 15, 2011 8:17 pm
Structure of the Robot:
The structure involves a Aluminium base to fix the 3 servo motors. It is made of a rectangular base ,built using Aluminium frames used in making windows.
The mountings of the 3 servos in the aluminium frame is as shown:

Orthogonal View

Side View

Top View
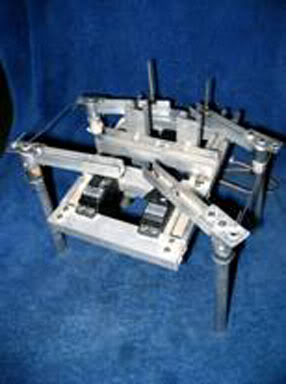
Completed Robot with legs attached
Servo Motor
The Hexapod has 6 legs, and requires 3 servos to operate them. I have used Tower Hobbies TS-53.

To know what is a servo and how it works check the Seattle robotics Servo Page for more details.
Robot's Walking Algorithm
The robot uses tripod walking gait.
At any point in time the Hexapod has 3 legs on the ground. The center legs are used to lift the hexapod up while the front and back legs does the job of giving the robot forward or backward thrust.
Check this link below to understand the walking dynamics of Spyder.
Link : 6 legged robot walking simulator
Servo Motor Control
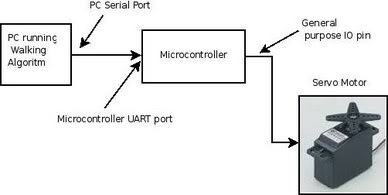
Servo Motor position is controlled using a PWM waveform. Changing the ON time of the PWM waveform results in change of the Servo Position.
For digital control of the PWM waveform we should have the PWM generation algorithm to be programmed into a microcontroller. This Microcontroller (uC) can be programmed to recieve commands ( Servo position commands ) via the serial port and then based on the command provided the uC generates the respective waveform which make the Servo move to the position as instructed by the command.
Source: Pyroelectro.com
The structure involves a Aluminium base to fix the 3 servo motors. It is made of a rectangular base ,built using Aluminium frames used in making windows.
The mountings of the 3 servos in the aluminium frame is as shown:
Orthogonal View
Side View
Top View
Completed Robot with legs attached
Servo Motor
The Hexapod has 6 legs, and requires 3 servos to operate them. I have used Tower Hobbies TS-53.
To know what is a servo and how it works check the Seattle robotics Servo Page for more details.
Robot's Walking Algorithm
The robot uses tripod walking gait.
At any point in time the Hexapod has 3 legs on the ground. The center legs are used to lift the hexapod up while the front and back legs does the job of giving the robot forward or backward thrust.
Check this link below to understand the walking dynamics of Spyder.
Link : 6 legged robot walking simulator
Servo Motor Control
Servo Motor position is controlled using a PWM waveform. Changing the ON time of the PWM waveform results in change of the Servo Position.
For digital control of the PWM waveform we should have the PWM generation algorithm to be programmed into a microcontroller. This Microcontroller (uC) can be programmed to recieve commands ( Servo position commands ) via the serial port and then based on the command provided the uC generates the respective waveform which make the Servo move to the position as instructed by the command.
Source: Pyroelectro.com

pyroelectro- C Battery

- Posts : 288
Join date : 2010-11-23
Age : 40
Location : Cebu City
![]()
![]()
![]()
Page 1 of 1
Permissions in this forum:
You cannot reply to topics in this forum|
|
|